GPS Daten für FrSky oder FlySky Telemetrie Empfänger ! >aktualisiert 15.03.26<
Ich baue seit einigen Jahren kleine flotte Elektro-Deltamodelle. Mit den Fliegerkollegen wurde dann immer diskutiert, wie schnell das Teil eigentlich fliegt. Die Meinungen gingen da weit auseinander. GPS Module sind ab ca. 10 € zu bekommen, da könnte man doch ...Ra
 usgekommen ist ein
Telemetriewandler, der die Daten eines GPS-Moduls
entgegen nimmt und auf der anderen Seite passende
Daten für einen FrSky S.Port - oder einen
FlySky AFHDS2A iBus Empfänger ausgibt. Mit einem
Sender, der mit OpenTX oder EdgeTx läuft, können wir
die Daten dann anzeigen oder auch ansagen lassen.
Angelehnt an mein Vorgängerprojekt, das Daten der
Antriebe von bürstenlosen Motoren aufbereitet, habe
ich es GPS Telemetry Feeder (GTF) genannt.
Im Bild links ist ein Ausschnitt zu sehen, was nach
einer Sensorsuche in EdgeTx (Version 2.10) angezeigt
wird. Insgesamt sollten acht "Sensoren" gefunden
werden.
usgekommen ist ein
Telemetriewandler, der die Daten eines GPS-Moduls
entgegen nimmt und auf der anderen Seite passende
Daten für einen FrSky S.Port - oder einen
FlySky AFHDS2A iBus Empfänger ausgibt. Mit einem
Sender, der mit OpenTX oder EdgeTx läuft, können wir
die Daten dann anzeigen oder auch ansagen lassen.
Angelehnt an mein Vorgängerprojekt, das Daten der
Antriebe von bürstenlosen Motoren aufbereitet, habe
ich es GPS Telemetry Feeder (GTF) genannt.
Im Bild links ist ein Ausschnitt zu sehen, was nach
einer Sensorsuche in EdgeTx (Version 2.10) angezeigt
wird. Insgesamt sollten acht "Sensoren" gefunden
werden.Der besondere Vorteil von GTF liegt in der Geschwindigkeitsmessung. Es wird nicht die Geschwindigkeit über Grund gemessen, sondern die 3D-Geschwindigkeit. Zusätzlich zu den alle 0,25 Sekunden ermitteltem Wert, wird alle 3 Sekunden ein um Extremwerte bereinigter Mittelwert gebildet und übertragen. Wer es mit GTF versuchen möchte, findet nachfolgend alles zum Bau und zur Inbetriebnahme.
Wer ähnliches mit weniger Bastelaufwand und ohne spezielle Programmiergeräte bauen möchte, dem sei openXsensor_on_RP2040 (wird leider nicht mehr weiterentwickelt) oder MSRC-Multi Sensor Telemetry for RC (RP2040) empfohlen. Beide Programme können diverse Sensoren (u.A. GPS) auslesen und in verschiedenen Telemetrieformaten ausgeben. Den verwendeten RP2040 gibt es sehr günstig auf fertigen Platinen zu kaufen. Die Firmware wird einfach auf ein virtuelles Laufwerk kopiert. Unbedingt ansehen.
Aber zurück zum GTF. Folgende Empfänger können mit dem GTF betrieben werden:
- FrSky Telemetrie-Empfänger mit S.Port
- FlySky iBus AFHDS2 Telemetrie-Empfänger
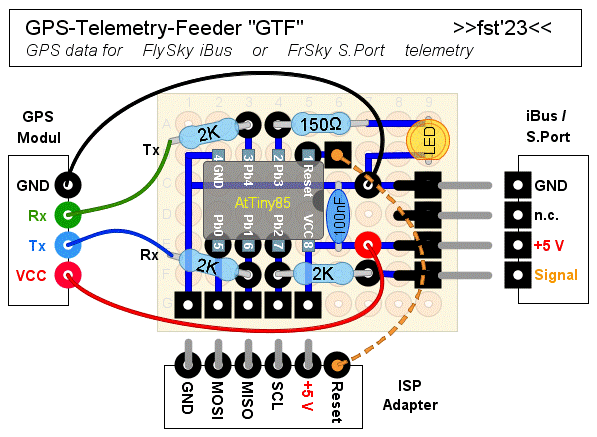
Die Arbeit erledigt ein Mikrocontroller, der mit der GTF-Firmware geladen werden muss. Der gesamte Hardware-Aufwand beschränkt sich im Minimalfall auf zwei Bauteile, dem Mikrocontroller und einen Kondensator. Die Firmware ist lauffähig auf:
- AtTiny85 oder Digispark-Board
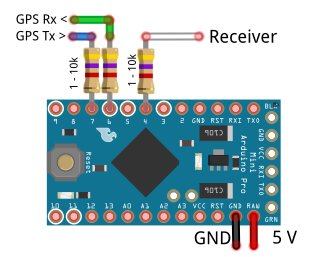
- Arduino auf Basis des AtMega168p (Nano, Mini Pro) - Typ 5V 16 MHz
- Arduino auf Basis des AtMega328p (Uno, Nano, Pro Mini) - Typ 5V 16MHz
- Arduino kompatibles Board auf Basis eines
LGT8F328P - Typ 5V oder 3,3V




 Adapter mit
Heißkleber eingeklebt.
Adapter mit
Heißkleber eingeklebt.