BLHeli Telemetrie ohne Flugcontroller! >aktualisiert 15.03.26<
BLHeli_32 ESCs sind sehr häufig telemetriefähig, das heißt sie können Daten, wie die Spannung des Flugakkus, Strom, entladene Kapazität, Motordrehzahl und Temperatur (des Hauptprozessors) ausgeben. Alle diese Daten werden im ESC selber gemessen. Da BLHeli aus der Multicopter-Welt kommt, übernimmt üblicherweise der obligatorische Flugcontroller die Anforderung und Weitergabe an einen telemetriefähigen RC Empfänger. Ab der Firmwareversion 32.6 können wir BLHeli_32 so konfigurieren, dass die Telemetriedaten permanent gesendet werden. Aber Achtung: Nicht jeder BLHeli_32 ESC kann Telemetrie oder er kann keinen Strom/Kapazität messen.Seit Ende 2024 wird BLHeli_32 wird nicht mehr weiterentwickelt und es werden keine weiteren Lizenzen an die Hersteller verteilt. Es wird also nur noch abverkauft, was bereits bei den Herstellern ist. Die tröstliche Nachricht: Es gibt schon würdige Nachfolger. Die heißen AM32 und ESCape32. Beide können Telemetriedaten im selben Format ausgeben, wie BLHeli_32 (BLHeli_32 hat genau genommen das schon für KISS-ESCs verwendete Protokoll verwendet). ESCape32 ist ein Sonderfall, weil diese Firmware Telemetriedaten nicht nur im KISS-Format ausgeben kann, sondern auch direkt als FrSky S.Port und FlySky iBus. Der BTF ist in diesem Fall überflüssig.
Das von mir vorgestellte Windows-Programm BLHeliTelemetryView kann ebenfalls KISS-Telemetrie lesen und mittels eines USB-UART Wandlers auf einem Windows-PC anzeigen und speichern. Das geht mit ESCs, auf denen die Firmware BLHeli_32, AM32 oder ESCape32 läuft.
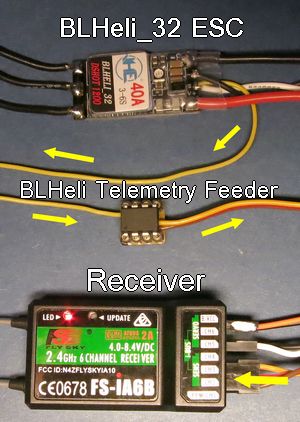
Eigentlich wollen wir die Daten aber auf unserem Fernsteuersender sehen! Um die Daten auf dem Senderdisplay bewundern zu können, müssen diese in das Telemetrieformat des jeweiligen Herstellers übersetzt werden. Genau das kann der BLHeli-Telemetry-Feeder (BTF). Aktuell kann der BTF drei Protokolle ausgeben:
- FrSky D8 Hub (nur BTF aus den Jahr 2019)
- FrSky S.Port
- FlySky iBus Telemetry
Seit Firmwareversion 32.8 kann BLHeli_32 S.Port
Telemetrie direkt ausgeben. Der BTF ist damit für
FrSky Empfänger mit S.Port Schnittstelle überflüssig. Allerdings kann das
nicht jeder ESC; falls ja, zeigt die BLHeliSuite32
den Eintrag "S.PORT Physical ID" im Setup
an. Für ESCs, die keine S.Port Telemetrie erzeugen
können und für die anderen Protokolle bleibt BTF
aber weiterhin interessant.
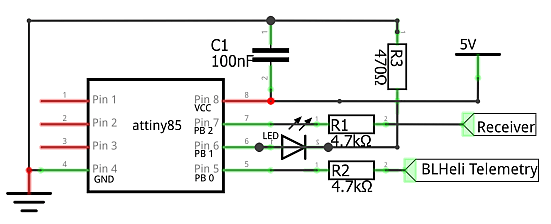
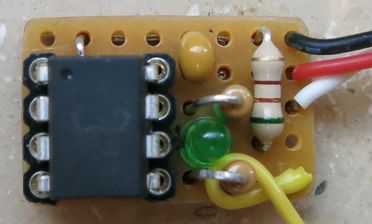
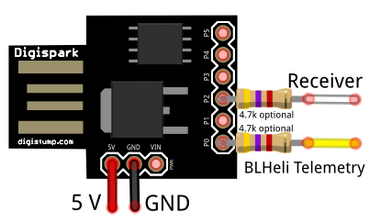
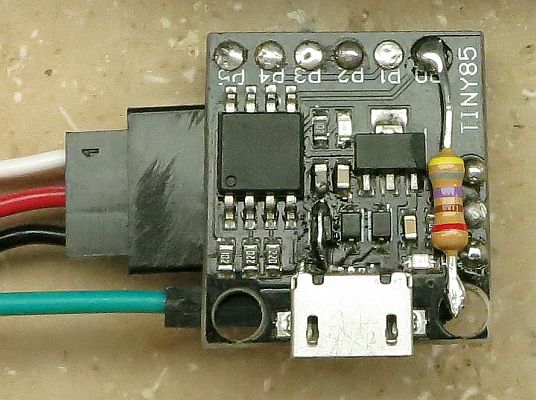
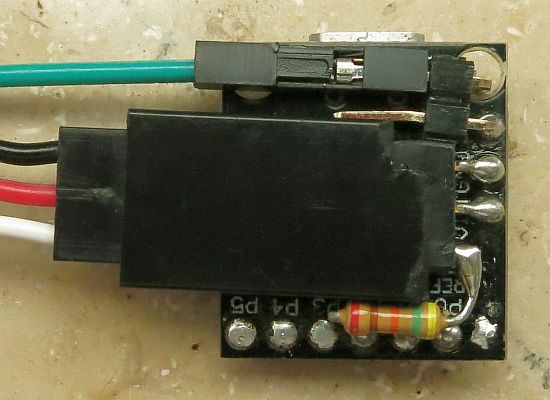
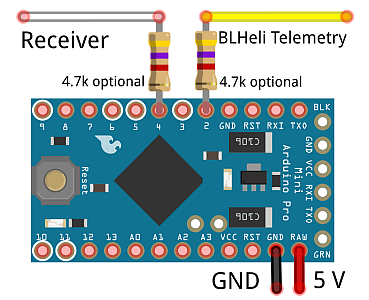
Die Arbeit erledigt ein Mikrocontroller, der mit der BTF-Firmware geladen werden muss. Der gesamte Hardware-Aufwand beschränkt sich im Minimalfall auf zwei Bauteile, dem Mikrocontroller und einen Kondensator. Die Firmware ist lauffähig auf:
- AtTiny13 (abgespeckte Version; nur für D8 Hub)
- AtTiny45
- AtTiny85 oder Digispark-Board
- Arduino auf Basis des AtMega168p (Nano, Mini Pro) - Typ 5V 16 MHz
- Arduino auf Basis des AtMega328p (Uno, Nano, Pro Mini) - Typ 5V 16MHz
- Arduino kompatibles Board auf Basis eines
LGT8F328P - Typ 5V oder 3,3V
Wer ähnliches mit weniger Bastelaufwand und ohne spezielle Programmiergeräte bauen möchte, dem sei openXsensor_on_RP2040 (wird leider nicht mehr weiterentwickelt) oder MSRC-Multi Sensor Telemetry for RC (RP2040) empfohlen. Beide Programme können diverse Sensoren (u.A. verschiedene ESC-Telemetrieformate) auslesen und in verschiedenen Formaten an Rc-Empfänger ausgeben. Den verwendeten RP2040 gibt es sehr günstig auf fertigen Platinen zu kaufen. Die Firmware wird einfach auf ein virtuelles Laufwerk kopiert. Unbedingt ansehen.

 Beides können wir mit
dem Programm BLHeliSuite32 erledigen. Außerdem brauchen wir ein
Interface. Das kann ein günstiger Arduino sei, der von der
BLHeliSuite32 zum passenden Interface geflasht wird. Jedenfalls ist das
ein Thema für sich. Wer das machen möchte, sollte sich die zahlreichen
Tutorials im Netz und auf YouTube dazu reinziehen.
Beides können wir mit
dem Programm BLHeliSuite32 erledigen. Außerdem brauchen wir ein
Interface. Das kann ein günstiger Arduino sei, der von der
BLHeliSuite32 zum passenden Interface geflasht wird. Jedenfalls ist das
ein Thema für sich. Wer das machen möchte, sollte sich die zahlreichen
Tutorials im Netz und auf YouTube dazu reinziehen. 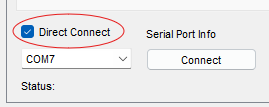 Für
AM32 gibt es mehrere Konfigurationsprogramme. Der Online
Configurator hat bei mir bisher keine Verbindung zu einem einzelnen
ESC zustande gebracht. Mit dem "Multi ESC Config Tool" klappt es
aber zuverlässig. Wichtig ist, Direct Connect zu wählen. Andernfalls
wird vermutlich ein Flightcontroller erwartet.
Für
AM32 gibt es mehrere Konfigurationsprogramme. Der Online
Configurator hat bei mir bisher keine Verbindung zu einem einzelnen
ESC zustande gebracht. Mit dem "Multi ESC Config Tool" klappt es
aber zuverlässig. Wichtig ist, Direct Connect zu wählen. Andernfalls
wird vermutlich ein Flightcontroller erwartet. 
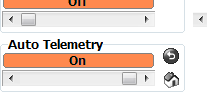
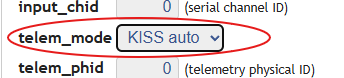 Für ESCape32 gibt es mehrere Möglichkeiten zum Konfigurieren der
Firmware. Am komfortabelsten geht es per Wlan (=Wifi) mit dem
"ESCape32-Wifi-Link". Hier stellen wir "KISS-auto" als Telemetrie
Modus ein.
Für ESCape32 gibt es mehrere Möglichkeiten zum Konfigurieren der
Firmware. Am komfortabelsten geht es per Wlan (=Wifi) mit dem
"ESCape32-Wifi-Link". Hier stellen wir "KISS-auto" als Telemetrie
Modus ein.