 Was tun, wenn unser Programmer den AVR nicht mehr ansprechen kann?
Was tun, wenn unser Programmer den AVR nicht mehr ansprechen kann?
ACHTUNG: Der
Nachfolger heißt
RescueAVR-MikroShield und besteht nur noch aus drei Bauteilen!Es gibt ja schon etliche Geräte, die verfuste AVRs wieder zur Zusammenarbeit mit unserem Programmer überzeugen können. Neben einigen Programmern, die High-Volt-Programming beherrschen (nicht meine Preisliga) gibt es z.B. den Fusebit-Doctor. Bei den heutigen Preisen für Mikrocontroller müssen wir uns allerdings fragen, ob es den Aufwand überhaupt lohnt. Schön wäre, wenn es minimalistischer ginge. Wenn wir uns nicht ganz blöd anstellen, brauchen wir sowas ja auch nur selten.
So ein Arduino hat doch eigentlich schon fast alles, was es braucht, außer die 12V Spannungsversorgung. Hat da schon mal jemand was konstruiert? Ja, es hat!
- Das HV Rescue Shield und HV Rescue Shield 2
- RescueAVR auf fritzing.org und Github (empfohlen)
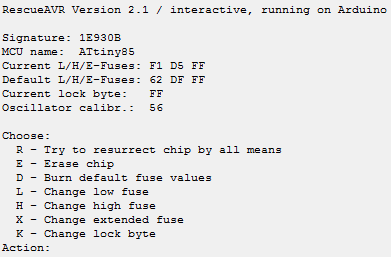
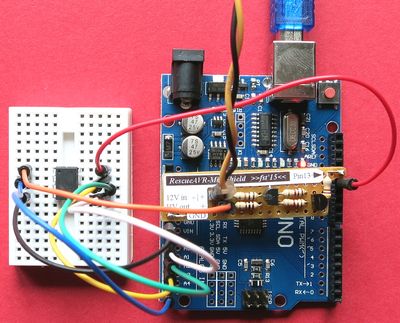
Im Bild sehen wir, wie mein 2,70 Euro China-Arduino-Uno einen ATtiny85 bearbeitet, bei dem ich den RESET-Pin deaktiviert habe,um ihn als normalen I/O-Pin zu benutzen. Die Programmierung war durch einen vorher(!) installierten Bootloader möglich, aber nicht mehr per ISP. Mittels RescueAVR können wir das nun jederzeit wieder rückgängig machen. Der UNO wird über USB mit Spannung versorgt. Die 12V kommen über das schwarz/orange Kabel auf das "Shield".
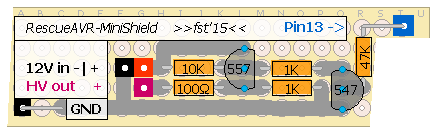
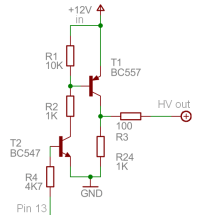 Als
Schaltung für die High-Volt Steuerung des RescueAVR hat der Entwickler
dieselbe verwendet, die auch beim Fusebit-Doctor verwendet wird. Die
Software (Sketch auf "arduinisch") läuft nämlich auch auf der
Fusebit-Doctor Hardware, darum soll es hier aber nicht gehen. Der
entsprechende Schaltungsteil ist links abgebildet. Die Funktion ist
ganz einfach: Wird HIGH-Pegel auf Pin 13 des Arduino gegeben, werden
die 12V auf des RESET-Pin unseres AVR gegeben.
Als
Schaltung für die High-Volt Steuerung des RescueAVR hat der Entwickler
dieselbe verwendet, die auch beim Fusebit-Doctor verwendet wird. Die
Software (Sketch auf "arduinisch") läuft nämlich auch auf der
Fusebit-Doctor Hardware, darum soll es hier aber nicht gehen. Der
entsprechende Schaltungsteil ist links abgebildet. Die Funktion ist
ganz einfach: Wird HIGH-Pegel auf Pin 13 des Arduino gegeben, werden
die 12V auf des RESET-Pin unseres AVR gegeben.